
 产品:74
产品:74
 联系我们
联系我们

ABB机器人由机器人主体、驱动系统和控制系统三个基本部分组成。机器人主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数ABB工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
ABB机器人IRB1200是ABB新型第四代机器人家族中新成员,具有敏捷、紧凑、轻量的特点,控制精度和路径精度俱优,可广泛应用与物料搬运与装配运用。

ABB机器人示教器

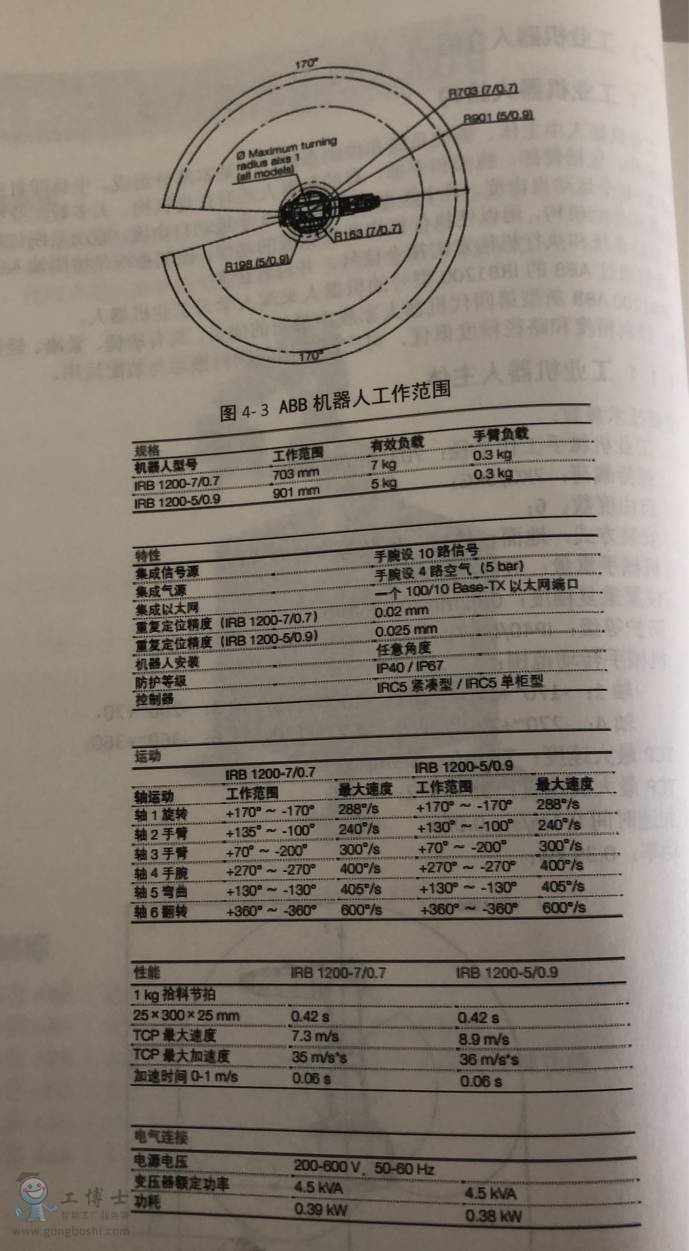
主要技术参数:
工业机械手工作半径: 703mm/900mm;
抓持载荷: 7KG/5KG;自由度数: 6;
抓持载荷: 7KG/5KG;自由度数: 6;
安装方式:地面、墙壁、倒装等多种方式;机械手重量: 52KG/54KG;
位置重复精度: 0.02mm/0.025mm;防护等级: IP40/IP67;
机械手转动范围:轴1: -170~+170, 轴2: -100~+135, 轴3: -200~+70,轴4: -270~+270, 轴5: -130~+130, 轴6:-360~+360;TCP*大速度: 7.3m/s; 8.9m/s;TCP*大加速度: 35m/s^2;加速时间0-1m/s: 0.06s;功率: 0.39 kw
机械手转动范围:轴1: -170~+170, 轴2: -100~+135, 轴3: -200~+70,轴4: -270~+270, 轴5: -130~+130, 轴6:-360~+360;TCP*大速度: 7.3m/s; 8.9m/s;TCP*大加速度: 35m/s^2;加速时间0-1m/s: 0.06s;功率: 0.39 kw
ABB机器人示教器
FlexPendant设备(有时也称为TPU或教导单元)用于处理与机器人系统操作相关的许多功能:运行程序;微动控制操纵器;修改ABB机器人程序等。FlexPendant由硬件和软件组成,其本身就是一套完整的计算机。FlexPendant 是IRC5的一个组成部分,通过集成电缆和连接器与控制器连接。
FlexPendant可在恶劣的工业环境下持续运作。其触摸屏易于清洁,且防水、防油、防溅锡。
操作FlexPendant时,通常会手持该设备。右利手者通常左手持设备,右手在触摸屏上操作。而左利手者可以轻松通过将显示器旋转180 度,使用右手持设备。
示教器界面
选择机械单元。
切换移动模式、重定向或线性。切换移动模式,轴1-3或轴4-6。切换增量。
Step BACKWARD (步退)按钮。使程序后退一步的指令STAT (启动)按钮。开始执行程序。
Step PORWARD (步进)按钮。使程序前进-步的指令。Stop (停止)按钮。停止程序执行。
ABB菜单操作员窗口
操作员窗口显示来自机器人程序的消息。程序需要操作员作出某种响应以便继续时往往会出现情况。
状态栏
状态栏显示与系统状态有关的重要信息,如操作模式、电机开启/关闭、程序状态灯
关闭按钮
点击关闭按钮将关闭当前的视图或应用程序。任务栏
透过ABB菜单,你可以打开多个视图,但一次只 能操作一个。任务栏显示所有打开的视图,并可用于视图切换。“快速设置”菜单
快速设置菜单包含微动控制和程序执行的设置。
更多点击:ABB机器人
选择机械单元。
切换移动模式、重定向或线性。切换移动模式,轴1-3或轴4-6。切换增量。
Step BACKWARD (步退)按钮。使程序后退一步的指令STAT (启动)按钮。开始执行程序。
Step PORWARD (步进)按钮。使程序前进-步的指令。Stop (停止)按钮。停止程序执行。
ABB菜单操作员窗口
操作员窗口显示来自机器人程序的消息。程序需要操作员作出某种响应以便继续时往往会出现情况。
状态栏
状态栏显示与系统状态有关的重要信息,如操作模式、电机开启/关闭、程序状态灯
关闭按钮
点击关闭按钮将关闭当前的视图或应用程序。任务栏
透过ABB菜单,你可以打开多个视图,但一次只 能操作一个。任务栏显示所有打开的视图,并可用于视图切换。“快速设置”菜单
快速设置菜单包含微动控制和程序执行的设置。
更多点击:ABB机器人
- 下一篇:暂无
- 上一篇:ABB机器人的优势有哪些?——ABB机器人